在之前的文章中,我们已经了解了SCK算法的基础知识。在这篇文章中,我们将通过完整构建算法的方式,来对SCK进行进一步的学习。
Credit:
本文中所引用的研究来自:
王芳芳,陈华 《动态背景下的视频目标跟踪》,硕士学位论文
SCK算法整体介绍
SCK算法,即SIFT and CBWH Kalman tracking,是王芳芳硕士在毕业论文中提出的一种目标追踪方法。这一算法使用复合模型描述目标,结合了它们的优点。
与在论文中提出的SCK算法不同的是,因为我将算法部署在了现实的实时环境下,同时也有运算能力的限制,所以对算法进行了一定的修改。鉴于原本的测试条件和开发环境中,视频内容是预先掌握了的,但是在现实环境中,无法对视频内容做出预判,也无法快速手动标记目标和提供训练集,所以原有的算法中一部分设计被省去,虽然降低了算法的性能,但是与实际的环境更适应。
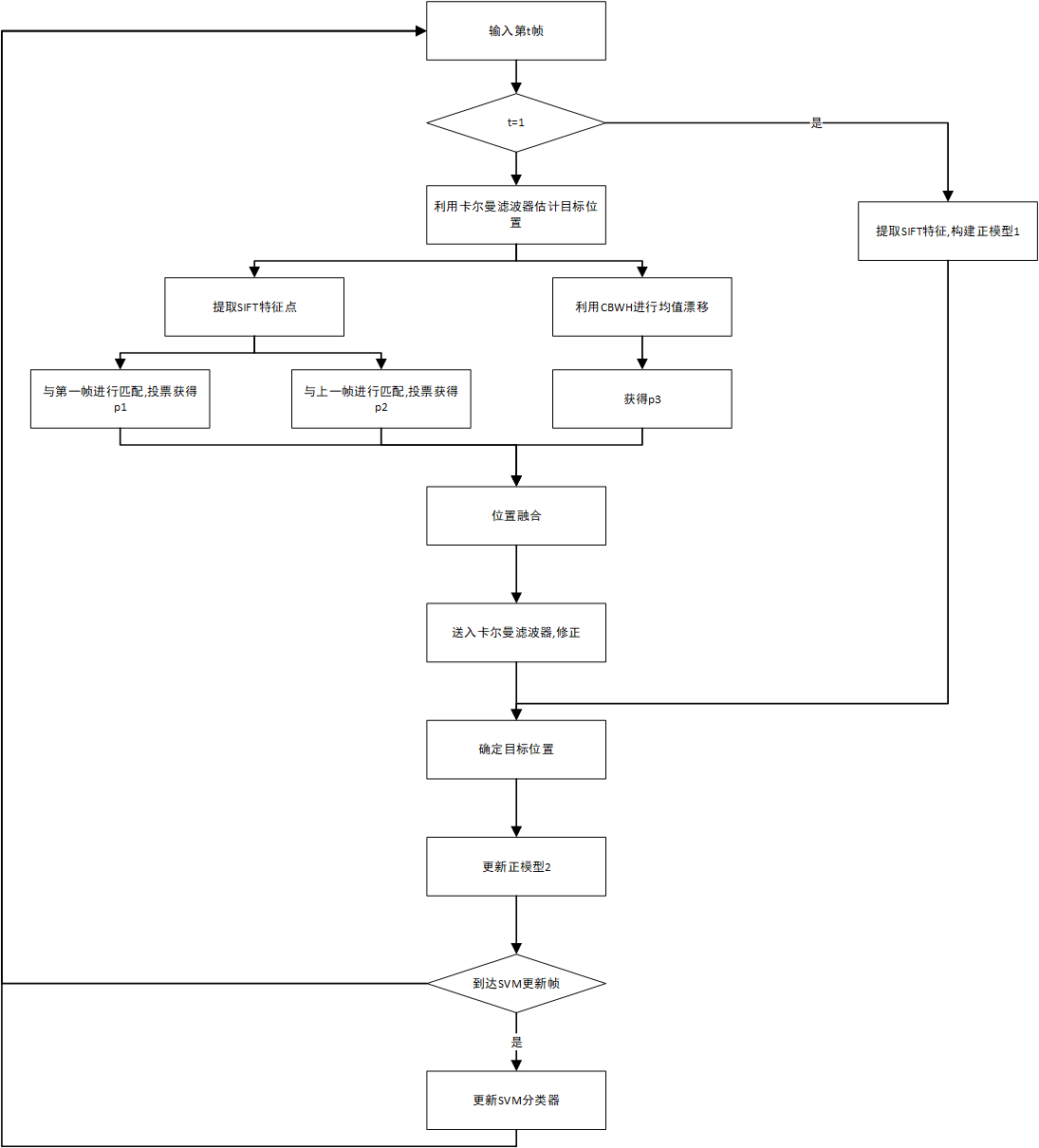
算法流程
完整的流程图将在这一部分之后附上,因为存在一些变换技巧需要先行说明。这一部分的说明不按严格流程顺序而是按照逻辑顺序。
SIFT正模型提取
因为CBWH本质上是均值漂移追踪算法,而SIFT本质上是匹配,所以SCK算法采用SIFT进行匹配,均值漂移作为辅助。
提取正模型1:正模型1是由起始帧提取的目标SIFT特征,它的范围是由人工指定的,在第一次启动算法的时候规定。
提取正模型2:正模型2是由上一帧提取的目标SIFT特征,是算法自行提取的,与当前帧最为接近,但是与第一帧可能有一定的变化。
匹配投票
在一对SIFT特征点匹配成功之后,可以计算这一对特征点的投票。计算公式是:
\[h(m)=r(m)-a(m)\]其中,\(r(m)\)是特征点在当前帧的位置向量,\(a(m)\)是模型中对应特征点对于目标中心的位置向量。\(h(m)\)是对应特征点的投票,意义是通过这一个特征点获得的目标中心位置。
因为存在匹配错误和特征点的\(a(m)\)错误的可能,所以在进行整合之前需要排除离群点。计算全部匹配成功的特征点之间的距离,排除最小距离大于阈值的点。这一部分点属于游离点,因为离它最近的点都在阈值之外。
在排除离群点之后就是加权投票。每个特征点的权值与其\(a(m)\)的长度的指数成反比。就是说,以\(e\)为底,\(a(m)\)为指数,与其成反比。这样,权值在特征点远离模型目标中心的时候下降较快,因为靠近中心点的特征点更为可靠。公式:
\[weight_i \propto e^{-|a_i|}\]将乘以权值的投票累加,获得最终位置。若使用的是第一帧的模型,即正模型1,那么将获得位置p1;使用正模型2则将获得位置p2。
卡尔曼滤波在SCK中的作用
在每次进行真正的图像追踪之前,SCK算法用卡尔曼滤波先根据之前构建的运动模型,以及上一帧的状态进行一次预测。这一预测标定了一个可能的目标位置,之后的SIFT特征点提取将在预测的目标中心附近完成,以降低运算量并且防止远处的背景干扰。在每次获得一帧中的目标的基于追踪的位置之后,将利用结果对卡尔曼模型进行修正。因为预测过程较为简单,所以在之后重点关注修正过程。
CBWH跟踪
因为虽然CBWH的收敛性较好,但也容易陷入局部最优,同时为了降低计算量,CBWH追踪的起始点被设定为卡尔曼滤波的预测位置,从这个点出发,经过一定次数的迭代,CBWH将收敛至一个中心点,此时CBWH追踪框内的背景加权颜色直方图特征和模型一致。这一中心点标记为p3。
位置融合与卡尔曼修正
以p1,p2,p3为中心,获取三个可能中心的周边区域patch1,patch2,patch3。之后将它们与第一帧的初始化目标块patch进行比较,获取相似度。在计算相似度之前,先将图像块处理到规范化分辨率\(15\times 15\)。规范化的目的是方便之后统一处理,规范化使用标准的平均映射方法。相似度使用如下函数计算:
\[\text{Similarity}\left(\text{patch}_{i},\text{patch}\right)= 0.5 \left(\mathrm{NCC}\left(\text{patch}_{i},\text{patch}\right) +1\right),\quad i=1,2,3\]其中,
\[NCC(\text{pa1,pa})=\frac{1}{n-1} \sum_{i=1}^n\frac{\left( pa1_i - \overline {pa1}_i \right) \left( pa2_i- \overline {pa2}_i \right) }{\sigma_1\sigma_2}\]\(\overline {pa1}\)和\(\overline {pa2}\)分别是\(pa1\)和\(pa1\)的均值向量,\(\sigma_1\)和\(\sigma_2\)分别是它们的标准差。因为NCC的值在-1~1之间,所以通过归一化,将其转化为0~1的数。
以经过归一化的相似度作为权值,将加权得到的结果作为观测值送入卡尔曼滤波器,获得的结果就是修正之后的最优位置。
尺度及尺寸判定
因为CBWH比较依赖于目标追踪窗口的大小,过大的窗口会混入大量的背景特征,过小的窗口又导致无法完全获得整个目标的特征。所以,需要使用一定的方法判定目标当前的尺寸和特征尺度。
根据前一帧与当前帧的特征点匹配情况, 分别计算前一帧内特征点之间的欧氏距离, 以 及当前帧内特征点之间的欧氏距离, 利用相应点对的欧氏距离之比得到尺度变化。 令前一帧 特征点的位置为\(\text{loc_p}^i, \quad i=1,….mp\),当前帧的匹配特征点位置为\(\text{loc_c}^i, \quad i=1,….mp\),\(dist_p_{u,v}\)和\(dist_c_{u,v}\)是某两个特征点之间的欧氏距离,那么找到:
\[\mathbf{Sp}_{\mathrm u,\mathrm v}=\left\{ \frac{dist_-c_{u,v}}{dist_-p_{u,v}},\mathrm u \neq \mathrm v \right\}_{\mathrm u=1}\]并进行排序,取中值作为目标相对于前一帧的尺度变化。同理,与第一帧的特征点进行运算,可以得到相对于第一帧的尺度变化。
SVM分类
对于匹配失败的特征点,进行SVM分类,分类特征是目标点/背景点。因为现实使用中无法做到手动标记目标点,所以,训练集准备采用基于Sobel边缘检测的图像分割技术,自动完成。或者,在对精确度要求更高的条件下,由用户手动快速选择目标的具体范围。SVM分类器更新的时候将自动完成训练集生成,因为更新帧出现的并不频繁,所以可以采取SVM之外的运算更复杂但是精度更高的聚类方法进行训练集生成。
算法流程图
到这里,SCK算法的基本内容就已经完成了(完结撒花)!之后我们将继续学习其他的图像追踪技术,同时,我也会继续在ZYNQ平台上部署这一追踪算法,并在有一定阶段性成果的时候不定期更新算法部署的进度,和学习成果。如果有兴趣,或者有任何意见或建议,欢迎一起讨论!